Appearance
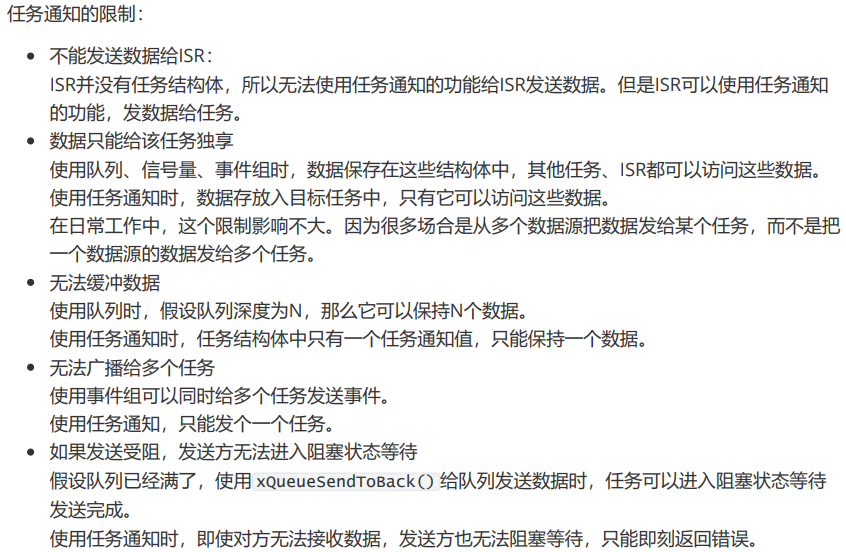
任务通知
使用之前的彼变量的时候我们并不知道对方是谁, 使用任务通知的时候可以明确指定, 通知哪一个任务
使用任务东芝的时候不需要单独创建一个结构体, TCB里面包含有这一个对象

c
#if ( configUSE_TASK_NOTIFICATIONS == 1 )
volatile uint32_t ulNotifiedValue[ configTASK_NOTIFICATION_ARRAY_ENTRIES ];
volatile uint8_t ucNotifyState[ configTASK_NOTIFICATION_ARRAY_ENTRIES ];//通知的状态
#endifTCB里面使用这两个值进行信息的传递
c#define configTASK_NOTIFICATION_ARRAY_ENTRIES 1其他任务向里面放入数据的时候不会进入阻塞, 只有成功和失败, 但是读取的时候可以进入等待
状态有三种
- taskNOT_WAITING_NOTIFICATION:任务没有在等
- taskWAITING_NOTIFICATION:任务在等待通知
- taskNOTIFICATION_RECEIVED:任务接收到了通知,也被称为pending(有数据了,待处理)
c
#define taskNOT_WAITING_NOTIFICATION ( ( uint8_t ) 0 ) /* 也是初始
状态 */
#define taskWAITING_NOTIFICATION ( ( uint8_t ) 1 )
#define taskNOTIFICATION_RECEIVED ( ( uint8_t ) 2 )在写入数据的时候会顺带更改状态的值
函数
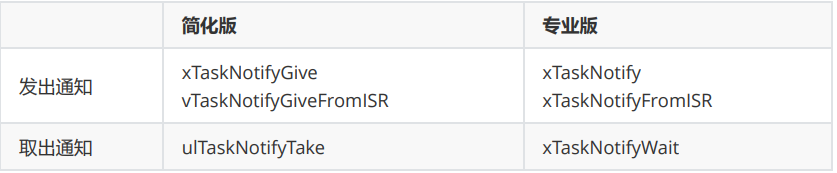
- 发送数据和接收
c
BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify );
void vTaskNotifyGiveFromISR( TaskHandle_t xTaskHandle, BaseType_t
*pxHigherPriorityTaskWoken );
uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait
);使用give会使得任务的通知值加一, 状态变为taskNOTIFICATION_RECEIVED
接收的时候通知值为0则阻塞, 通知大于零时候接收, 设置第一个参数为pdTRUE返回之前会清理把通知值清零, 设置为为pdFALSE的时候会把它减一, 返回的是值没有变化之前的通知值
**总结: **相当于一个轻量级信号量
- 高级函数
c
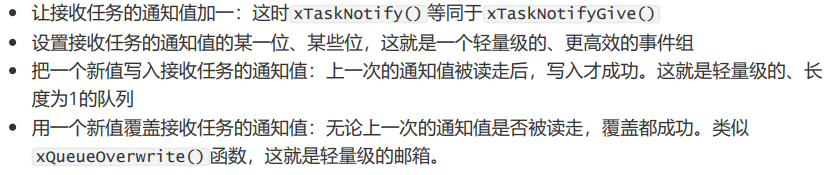
BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction );
BaseType_t xTaskNotifyFromISR( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction,
BaseType_t *pxHigherPriorityTaskWoken );Notify的参数1是要通知的任务, 参数二是设置的值, 参数三设置怎么使用

c
BaseType_t xTaskNotifyWait( uint32_t ulBitsToClearOnEntry,
uint32_t ulBitsToClearOnExit,
uint32_t *pulNotificationValue,
TickType_t xTicksToWait );
FreeRTOS实现
c
typedef struct tskTaskControlBlock
{
...
#if( configUSE_TASK_NOTIFICATIONS == 1 )
volatile uint32_t ulNotifiedValue; //记录任务通知的值
volatile uint8_t ucNotifyState; //记录任务是不是在等待任务通知
#endif
...
} tskTCB;c
BaseType_t xTaskGenericNotify( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyAction eAction, uint32_t *pulPreviousNotificationValue )
{
TCB_t * pxTCB;
BaseType_t xReturn = pdPASS;
uint8_t ucOriginalNotifyState;
configASSERT( xTaskToNotify );
pxTCB = ( TCB_t * ) xTaskToNotify;
taskENTER_CRITICAL();
{
//记录一下之前的值
if( pulPreviousNotificationValue != NULL )
{
*pulPreviousNotificationValue = pxTCB->ulNotifiedValue;
}
//获取当前的状态
ucOriginalNotifyState = pxTCB->ucNotifyState;
pxTCB->ucNotifyState = taskNOTIFICATION_RECEIVED;
//判断需要的操作
switch( eAction )
{
case eSetBits :
pxTCB->ulNotifiedValue |= ulValue;
break;
case eIncrement :
( pxTCB->ulNotifiedValue )++;
break;
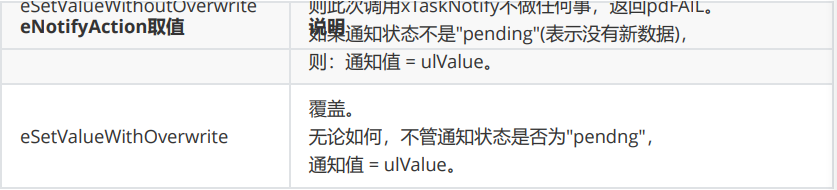
case eSetValueWithOverwrite :
pxTCB->ulNotifiedValue = ulValue;
break;
case eSetValueWithoutOverwrite :
if( ucOriginalNotifyState != taskNOTIFICATION_RECEIVED )
{
pxTCB->ulNotifiedValue = ulValue;
}
else
{
/* The value could not be written to the task. */
xReturn = pdFAIL;
}
break;
case eNoAction:
/* The task is being notified without its notify value being
updated. */
break;
}
/* 检查一下是不是在等待一个通知 */
if( ucOriginalNotifyState == taskWAITING_NOTIFICATION )
{
( void ) uxListRemove( &( pxTCB->xStateListItem ) );
prvAddTaskToReadyList( pxTCB );
if( pxTCB->uxPriority > pxCurrentTCB->uxPriority )
{
/* The notified task has a priority above the currently
executing task so a yield is required. */
taskYIELD_IF_USING_PREEMPTION();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
return xReturn;
}