Appearance
GPIO
电气特性
stm32支持的范围的2V-VDD-3.6V
识别电压的范围
COMS端口(只支持3,3V的端口), -0.3-1.164为逻辑0, 1.833-3.6为逻辑1, 最大的输出电压是25MA总的输出电流是150MA
寄存器
GPIO的寄存器
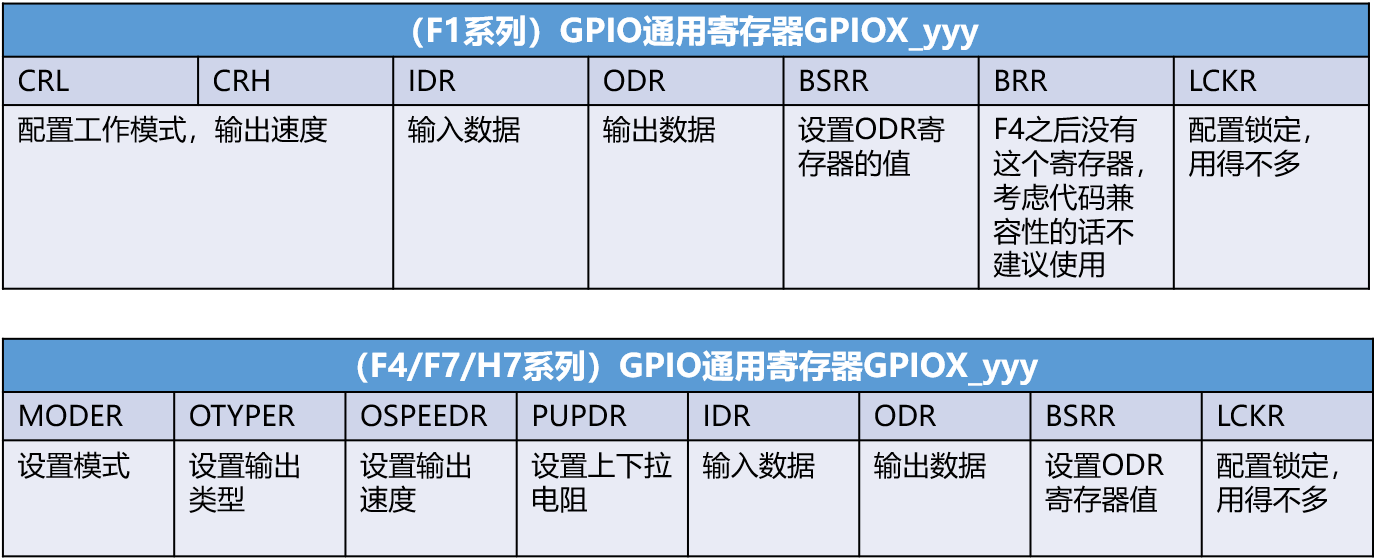
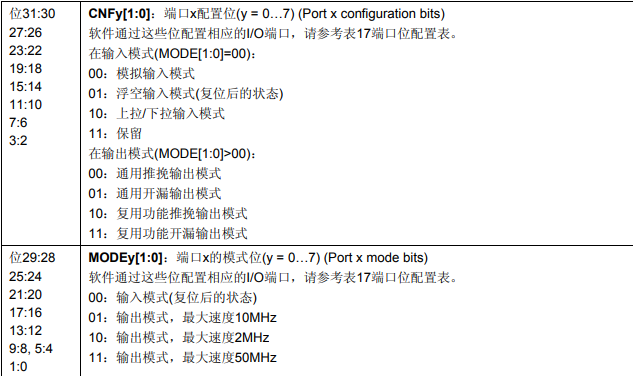
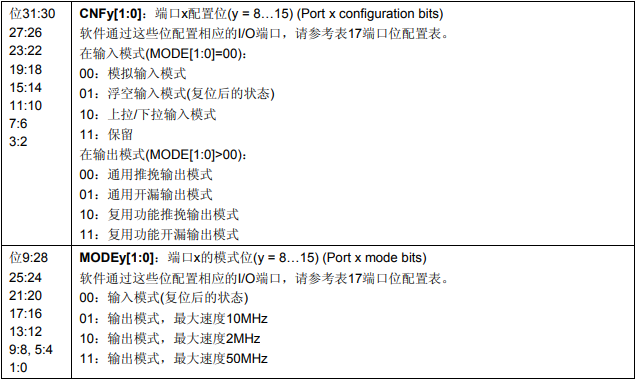
- GPIOx_CRL: 控制输入输出以及模式, 输出速度可理解为: 输出驱动电路的带宽:即一个驱动电路可以不失真地通过信号的最大频率。设置为上下拉的时候, 具体是哪一个是ODR寄存器控制的, 1为上拉, 0为下拉
- GPIOx_CRH: 同上
- GPIOx_IDR: 读出GPIO的状态

- GPIOx_ODR: 设置对应的位

- GPIOx_BSRR设置对应的位为0

- GPIOx_BRR: 清除

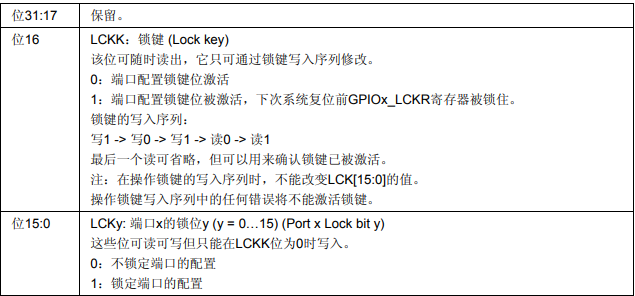
- GPIOx_LCKR: 锁, 主要控制的CR寄存器
ODR和BSRR之间的区别, ODR寄存器控制输入输出如果在读和修改访问之间发生中断, 可能会发生风险, 使用BSRR不会有这个风险
GPIOB->ODR |= 1<<3, 使用这一个的时候首先需要去读ODR的值然后修改, 最后重新写入, 如果在读取修改以后进入中断, 中断里面对这寄存器进行了修改, 再返回以后写入的时候会覆盖中断里面的操作
等同于GPIOB->BSRR = 0x00000008使用这一个的时候只有一个写操作
RCC寄存器
- RCC_CR时钟控制寄存器
- 时钟配置寄存器(RCC_CFGR)
- 时钟中断寄存器 (RCC_CIR)
- APB2 外设复位寄存器 (RCC_APB2RSTR)
- APB1 外设复位寄存器 (RCC_APB1RSTR)
- AHB外设时钟使能寄存器 (RCC_AHBENR)
- APB2 外设时钟使能寄存器(RCC_APB2ENR), RCC起始地址0x40021000, 偏移18

- APB1 外设时钟使能寄存器(RCC_APB1ENR)
- 备份域控制寄存器 (RCC_BDCR)
- 控制/状态寄存器 (RCC_CSR)
原理
GPIO简介
general purpose input output: 通用输入输出
通过软件控制引脚实现通讯控制, 信息采集
引脚的功能=> 数据手册
引脚的模式一共有六种
电源引脚, 晶振引脚, 复位引脚, 下载引脚, BOOT引脚, GPIO引脚
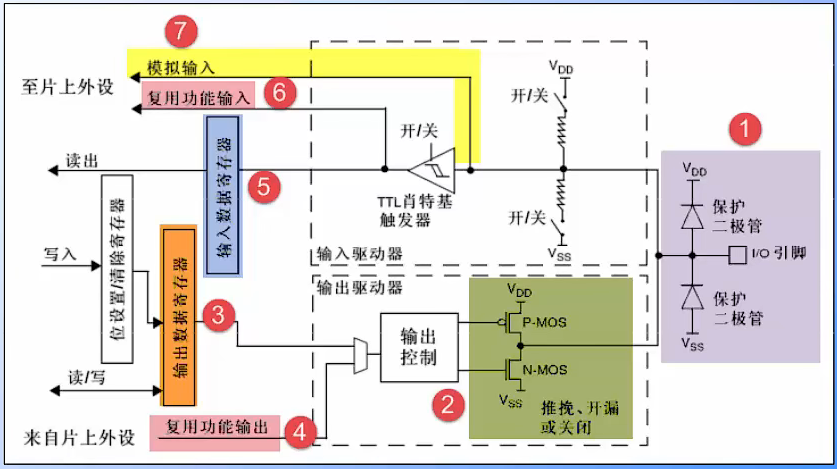
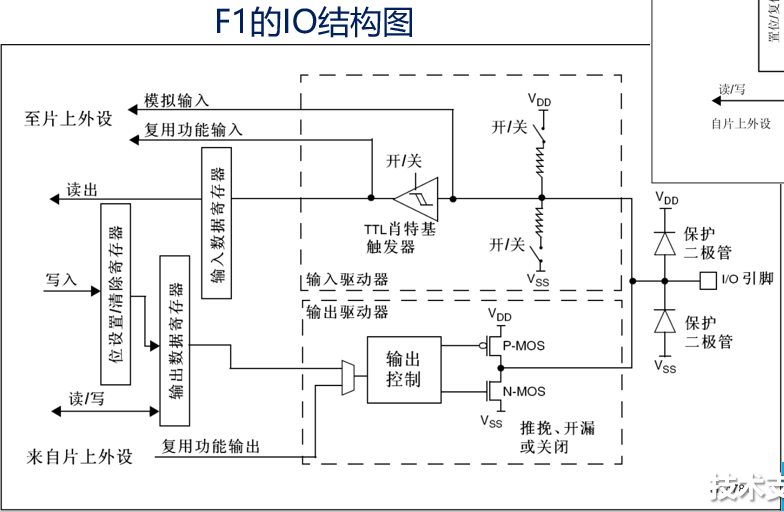
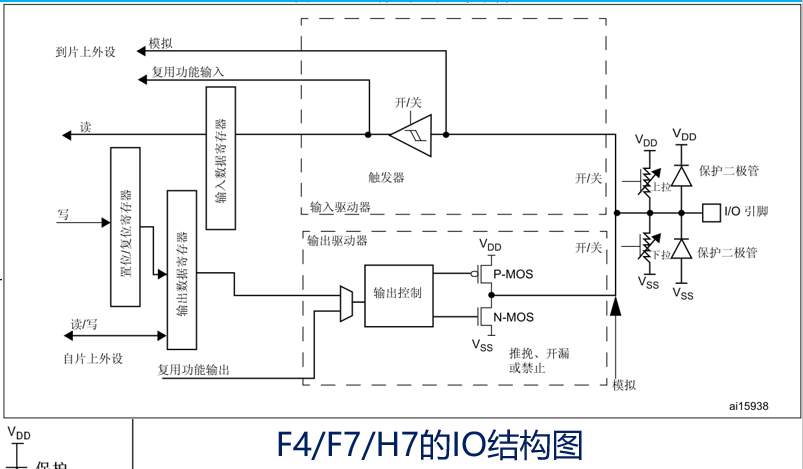
基本结构
引脚不要连接电机, 存在过充电压损坏电路, 链接的话需要电路隔离
如果想要接5V需要加一个限压电阻, 外界高电压的时候, 保护二极管有压降0.3V, 所以引脚处的电压会是3.6V这时候芯片也可以承受, 外接一个低电压的时候, 引脚处的电压是-0.3V这时候也是允许的
上拉电阻和下拉电阻为30K-50KΩ, 是一个弱的上下拉, 原因是驱动能力非常弱, 在外接的电压与内部的电压不同的时候不至于产生一个很大的电流
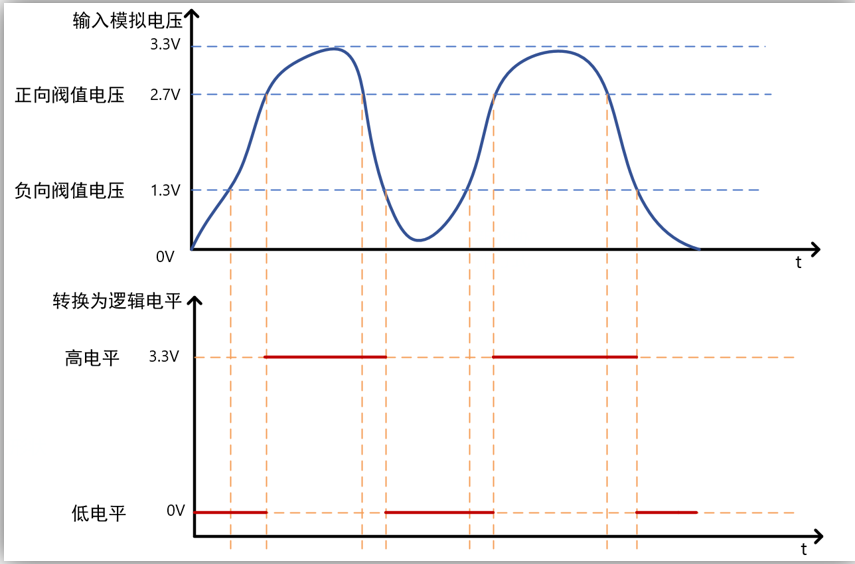
施密特触发器, 是一种整形电路, 把一个非标准的方波变为一个标准的方波, 有一个正向阈值电压, 负向阈值电压, 只有在变化的时候向上超过正向阈值电压, 或者向下超过负向阈值电压的时候输入的信号才会改变
P-MOS & N-MOS管
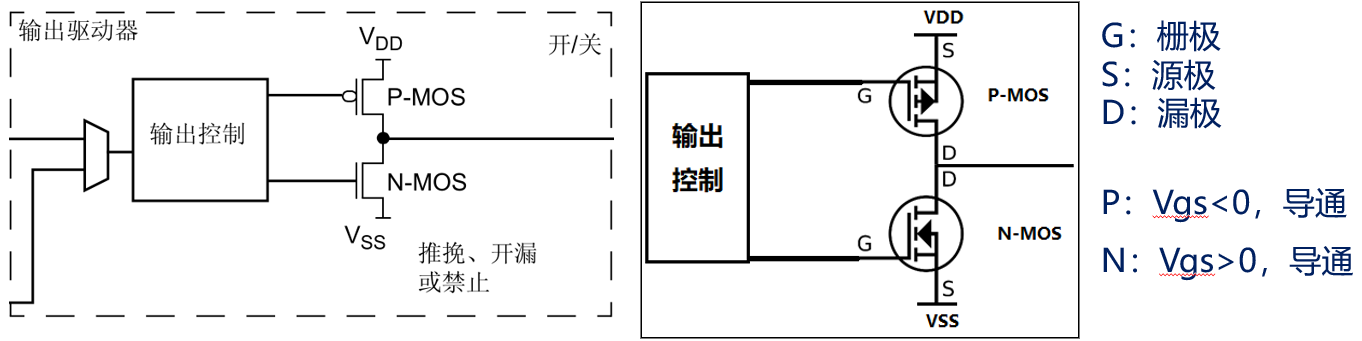
主要的区别是上下拉电阻的位置
引脚模式
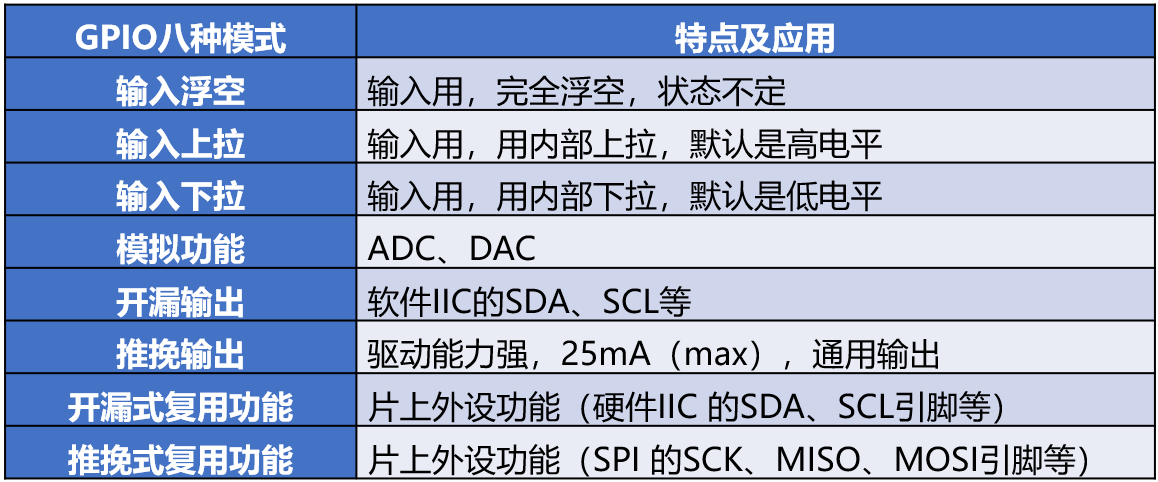
- 推挽输出
施密特触发器打开, 上下拉电阻关闭
不复用ODR写入0的时候N-MOS导通, 1P-MOS导通
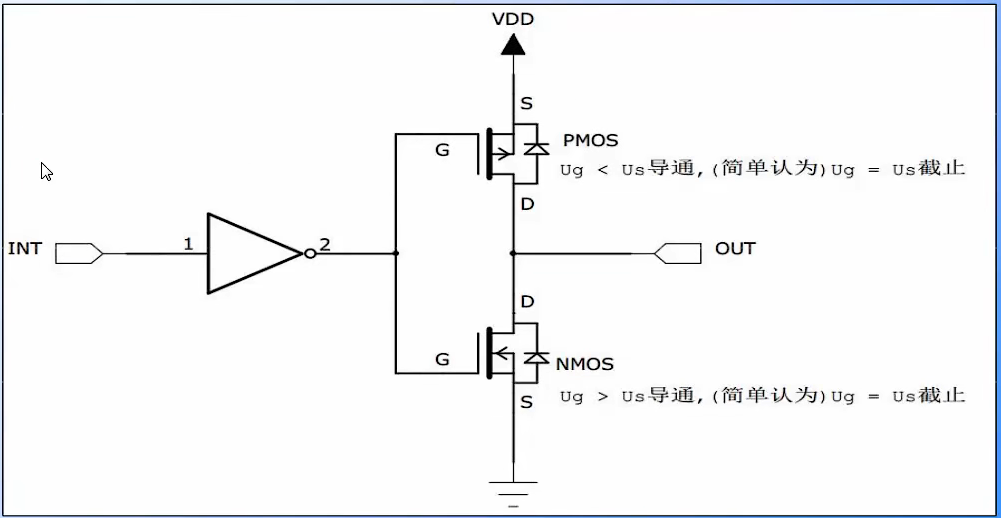
左侧输入的是1, 反向之后是0, 上面的导通, 输出的是高电平, 下面截止, 对外输出的电流比较大25ma, 是用的最多, 驱动能力强
- 开漏输出(复用)
上下拉电阻关闭, 施密特触发打开, P-MOS管始终不导通
不复用的时候向ODR寄存器写入0, N-MOS管导通, 1的时候高阻态
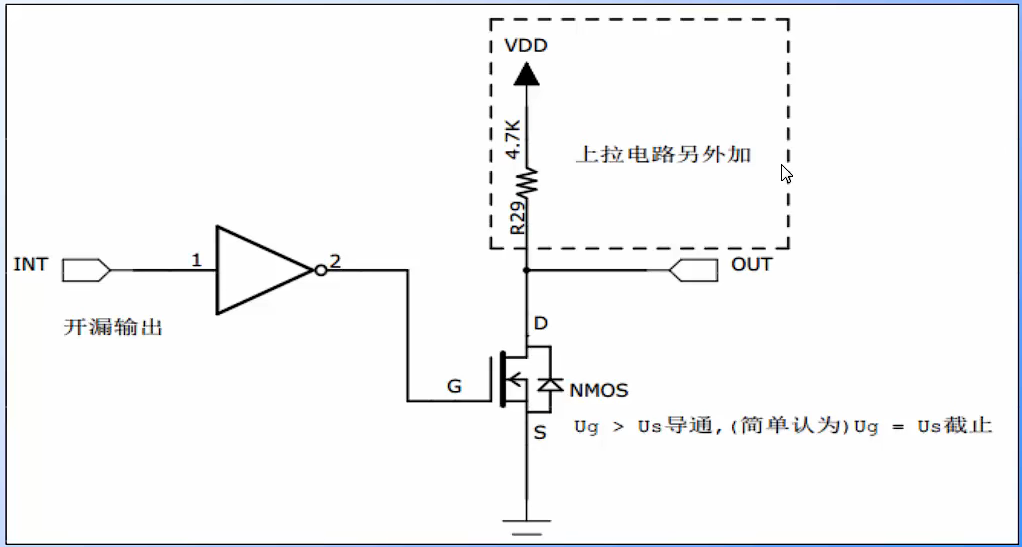
只能输出低电平, 这个模式的时候上面的NMOS管不工作, 高电平外部提供, 可以输出高电压
F4往后的芯片可以使用内部上拉
- 上拉下拉输入
通过软件配置, 向VSRR寄存器写入数字控制, 可以从IDR寄存器进行读取
施密特触发器: 起到门禁的功能, 高于2.0为1, 低于1.2为0
由于CR寄存器没有办法控制是上拉还是下拉, 所以实际是通过ODR寄存器进行设置
- 浮空输入
上下拉电阻关闭, 施密特触发器打开, 双MOS管不导通, 空闲的时候是高阻态的, 默认的电压是随机的
高组态: 一个器件的输出端口被断开或关闭,在这种情况下,器件的输出电平不确定,其电阻值会变得无穷大,称为高阻态(也叫三态)。在高阻态时,器件对电路的负载几乎没有任何影响,因为电路中的其他器件看不到这个器件的输出部分
- 模拟功能
上下拉电阻关闭, 施密特触发器关闭, MOS管不导通
实际实现
四步模型
- 初始化: 设置时钟, 设置参数(模式), IO设置, 中断设置(开中断, 设置NVIC)
- 读函数: 从外设读取数据
- 写函数: 向外设写入数据
- 中断服务函数: 根据中断位处理各种中断
第一种
c
//打开时钟
*(unsigned int *)0x40021018 |= (1<<3);
//控制CRL寄存器
*(unsigned int *)0x40010c00 |= (1<<(4*0));
//控制ODR寄存器
*(unsigned int *)0x40010c0c &= ~(1<<0);第二种
c
#ifndef __STM32F10x_H__
#define __STM32F10x_H__
#define PERIRHRAL_BASE ((unsigned int)0x40000000)
#define APB1_BASE (PERIRHRAL_BASE)
#define APB2_BASE (APB1_BASE + 0x10000)
#define AHB_BASE (APB1_BASE + 0x20000)
#define RCC_BASE (AHB_BASE + 0x1000)
#define GPIOB_BASE (APB2_BASE + 0x0c00)
#define GCCAPB2_ENR *(unsigned int *)(RCC_BASE + 0x18)
#define GPIOB_ODR *(unsigned int *)(GPIOB_BASE + 0xc)
#define GPIOB_CRL *(unsigned int *)(GPIOB_BASE + 0x0)
#endif第三种
c
typedef struct {
uint32_t GPIO_CRL;
uint32_t GPIO_CRH;
uint32_t GPIO_IDR;
uint32_t GPIO_ODR;
uint32_t GPIO_BSRR;
uint32_t GPIO_BRR;
uint32_t GPIO_LCKR;
}GPIO_TypeDef;
#define GPIOB ((GPIO_TypeDef *)GPIOB_BASE)第四种
使用初始化函数, 构建一个结构体, 使用结构体的参数作为初始化的值, 之后通过运算使用函数进行初始化
c
typedef enum
{
GPIO_Speed_10MHz = 1, // 10MHZ (01)b
GPIO_Speed_2MHz, // 2MHZ (10)b
GPIO_Speed_50MHz // 50MHZ (11)b
}GPIOSpeed_TypeDef;
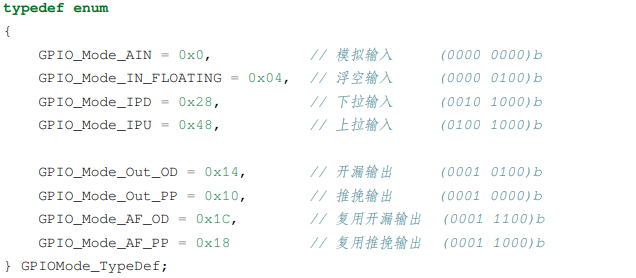
typedef enum
{ GPIO_Mode_AIN = 0x0, // 模拟输入 (0000 0000)b
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入 (0000 0100)b
GPIO_Mode_IPD = 0x28, // 下拉输入 (0010 1000)b
GPIO_Mode_IPU = 0x48, // 上拉输入 (0100 1000)b
GPIO_Mode_Out_OD = 0x14, // 开漏输出 (0001 0100)b
GPIO_Mode_Out_PP = 0x10, // 推挽输出 (0001 0000)b
GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出 (0001 1100)b
GPIO_Mode_AF_PP = 0x18 // 复用推挽输出 (0001 1000)b
}GPIOMode_TypeDef;
typedef struct
{
uint16_t GPIO_Pin;
uint16_t GPIO_Speed;
uint16_t GPIO_Mode;
}GPIO_InitTypeDef;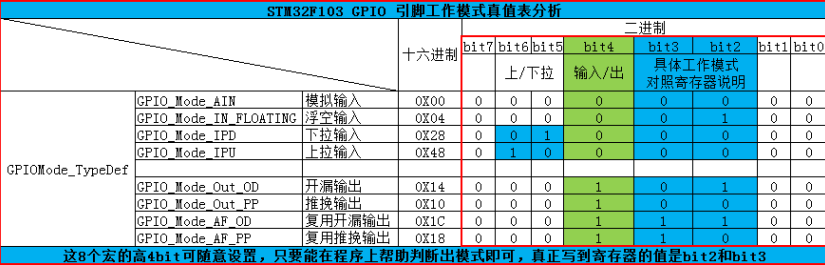
c
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)
{
uint32_t currentmode = 0x00, currentpin = 0x00, pinpos = 0x00, pos = 0x00;
uint32_t tmpreg = 0x00, pinmask = 0x00;
/*---------------------- GPIO 模式配置 --------------------------*/
// 把输入参数GPIO_Mode的低四位暂存在currentmode
currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F);
// bit4是1表示输出,bit4是0则是输入
// 判断bit4是1还是0,即首选判断是输入还是输出模式
if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00)
{
// 输出模式则要设置输出速度
currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed;
}
/*-------------GPIO CRL 寄存器配置 CRL寄存器控制着低8位IO- -------*/
// 配置端口低8位,即Pin0~Pin7
if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00)
{
// 先备份CRL寄存器的值
tmpreg = GPIOx->CRL;
// 循环,从Pin0开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
// pos的值为1左移pinpos位
pos = ((uint32_t)0x01) << pinpos;
// 令pos与输入参数GPIO_PIN作位与运算,为下面的判断作准备
currentpin = (GPIO_InitStruct->GPIO_Pin) & pos;
//若currentpin=pos,则找到使用的引脚
if (currentpin == pos)
{
// pinpos的值左移两位(乘以4),因为寄存器中4个寄存器位配置一个引脚
pos = pinpos << 2;
//把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
// 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos);
// 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0
GPIOx->BRR = (((uint32_t)0x01) << pinpos);
}
else
{
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1
GPIOx->BSRR = (((uint32_t)0x01) << pinpos);
}
}
}
}
// 把前面处理后的暂存值写入到CRL寄存器之中
GPIOx->CRL = tmpreg;
}
/*-------------GPIO CRH 寄存器配置 CRH寄存器控制着高8位IO- -----------*/
// 配置端口高8位,即Pin8~Pin15
if (GPIO_InitStruct->GPIO_Pin > 0x00FF)
{
// // 先备份CRH寄存器的值
tmpreg = GPIOx->CRH;
// 循环,从Pin8开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
pos = (((uint32_t)0x01) << (pinpos + 0x08));
// pos与输入参数GPIO_PIN作位与运算
currentpin = ((GPIO_InitStruct->GPIO_Pin) & pos);
//若currentpin=pos,则找到使用的引脚
if (currentpin == pos)
{
//pinpos的值左移两位(乘以4),因为寄存器中4个寄存器位配置一个引脚
pos = pinpos << 2;
//把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
// 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos);
// 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0
GPIOx->BRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1
GPIOx->BSRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
}
}
// 把前面处理后的暂存值写入到CRH寄存器之中
GPIOx->CRH = tmpreg;
}
}第五步
增加移植性, 使用宏定义
使用固件库
c
void LED_GPIO_Config()
{
//开启时钟
RCC_APB2PeriphClockCmd(LED_G_GPIO_CLOCK, ENABLE);
//初始化引脚
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = LED_G_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(LED_G_GPIO_PORT, &GPIO_InitStructure);
}读取
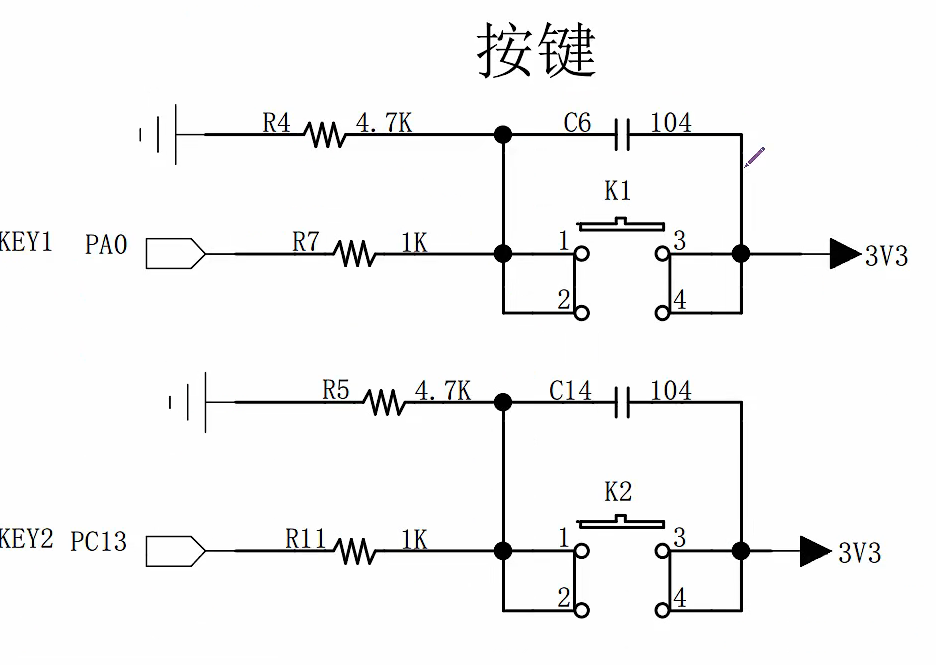
电阻是为了限流, 保护GPIO, 电容硬件消抖
PA0有唤醒功能, 上升沿唤醒
外部下拉设置为浮空
c
#define LED_G_TOGGLE {LED_GPIO_PORT->ODR^=LED_G_GPIO_PIN;}与1异或变号, 与0不变
c
uint8_t Key_Scaan(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{
if(GPIO_ReadInputDataBit(GPIOx,GPIO_Pin) == KEY_ON)
{
//松手检测
while(GPIO_ReadInputDataBit(GPIOx,GPIO_Pin) == KEY_ON);
return KEY_ON;
}
else
{
return KEY_OFF;
}
}位带操作
CM3权威指南=>5.4
寄存器里面的每一个位都重新找一个地址, 每个位膨胀为4个字节(32位), 最低位有效, 只有最前面的1MB会被映射
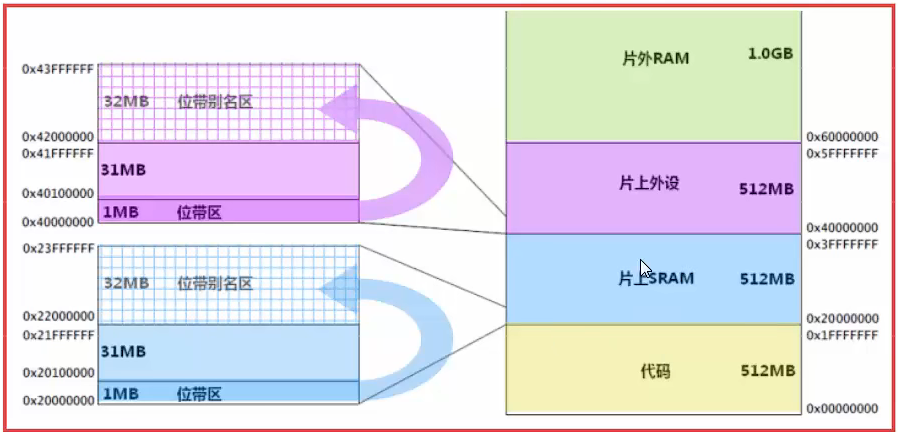
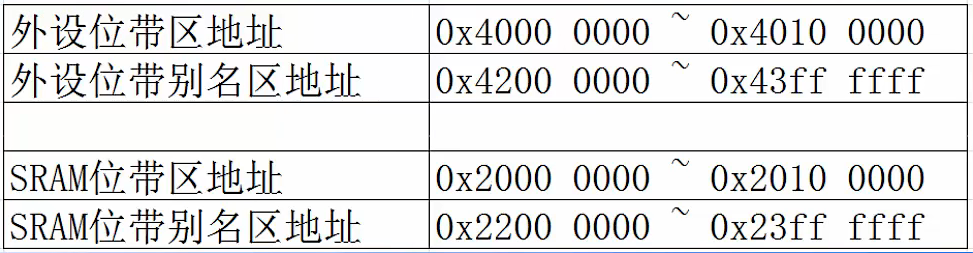
外设的AliasAddr = 0x42000000 + (A - 0x40000000)*8*4 + n*4
SARM的AliasAddr = 0x22000000 + (A - 0x20000000)*8*4 + n*4
A是寄存器的偏移值, n是寄存器的第几位
统一公式: 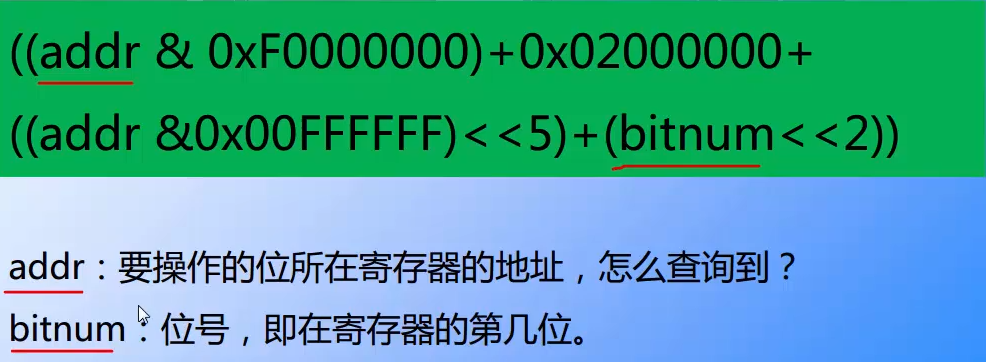
c
#define GPIOB_ODR_ADDR (GPIOB_BASE+0x0c)
#define GPIOA_IDR_ADDR (GPIOA_BASE+0x08)
#define GPIOC_IDR_ADDR (GPIOC_BASE+0x08)
#define PBout(n) *(unsigned int*)((GPIOB_ODR_ADDR & 0xF0000000) + 0x02000000 + ((GPIOB_ODR_ADDR & 0x00FFFFFF)<<5)+ (n<<2))
#define PBIn(n) *(unsigned int*)((GPIOA_IDR_ADDR & 0xF0000000) + 0x02000000 + ((GPIOA_IDR_ADDR & 0x00FFFFFF)<<5)+ (n<<2))
#define PCIn(n) *(unsigned int*)((GPIOC_IDR_ADDR & 0xF0000000) + 0x02000000 + ((GPIOC_IDR_ADDR & 0x00FFFFFF)<<5)+ (n<<2))
while(1){
if(PCIn(13)==KEY_ON)
{
while(PCIn(13)==KEY_ON);
LED_G_TOGGLE;
}
}复用
通用: IO端口输入或者输出是由GPIO外设控制的, 我们称之为通用
复用: 输入输出是由其他的外设进行控制的
某一个IO只能用于一种复用功能, 否则会出现错误
当IO复用出现冲突的时候, 可以考虑重映射
- F4F7H7
为了解决F1里面存在的IO复用功能冲突, F4以后的系列加入了复用器, 在设置的时候只能设置为一种功能
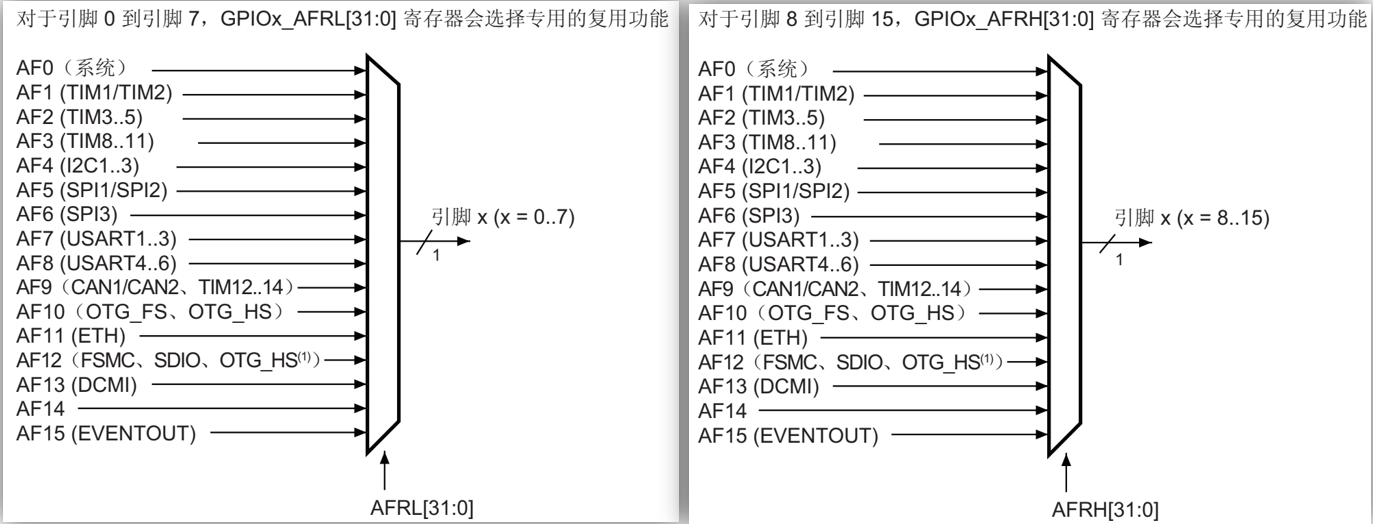
每一个IO都有一个复用器, 采用16路复用功能输入AF0-AF15
复用器一次只允许一个外设复用功能AF连接到IO引脚
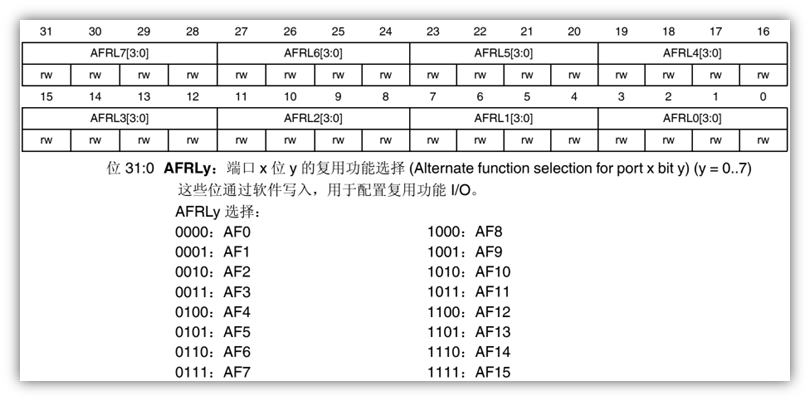
通过GPIOx_AFRL和GPIOx_AFRH进行控制
复位以后所有的IO都会连接到AF0
例: PA8的AF7对应的USART1_TX
手册中有一个表进行对应
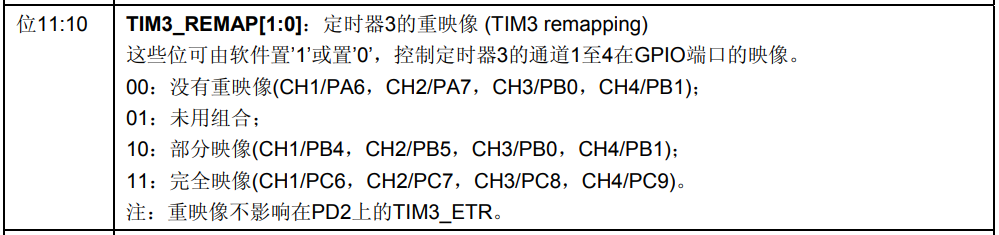
重映射
使用AFIO
AFIO_MAPR寄存器里面设置重映射的设备, 比如如果是重映射时钟的引脚
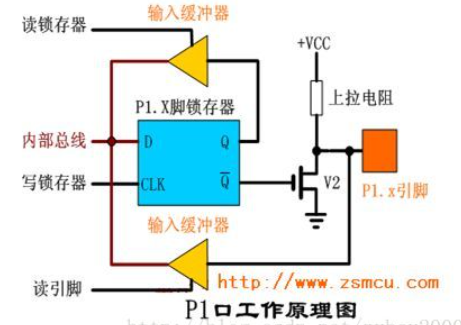
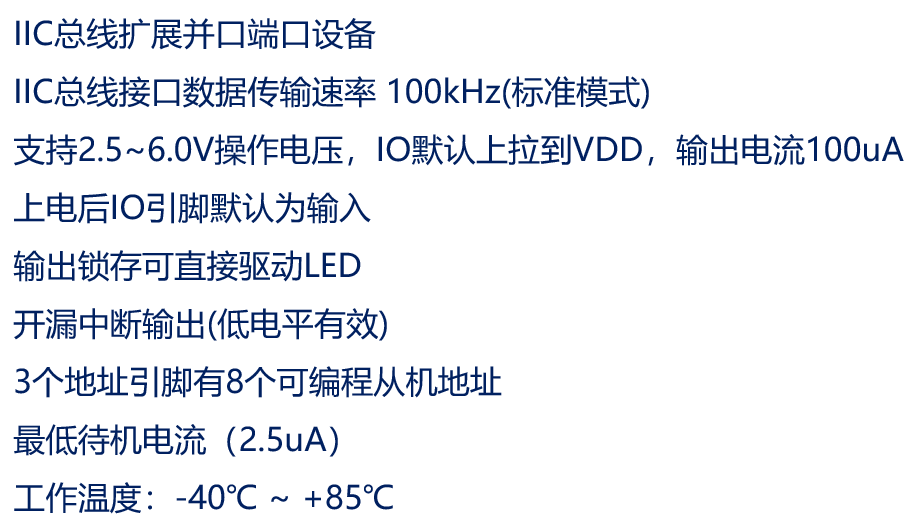
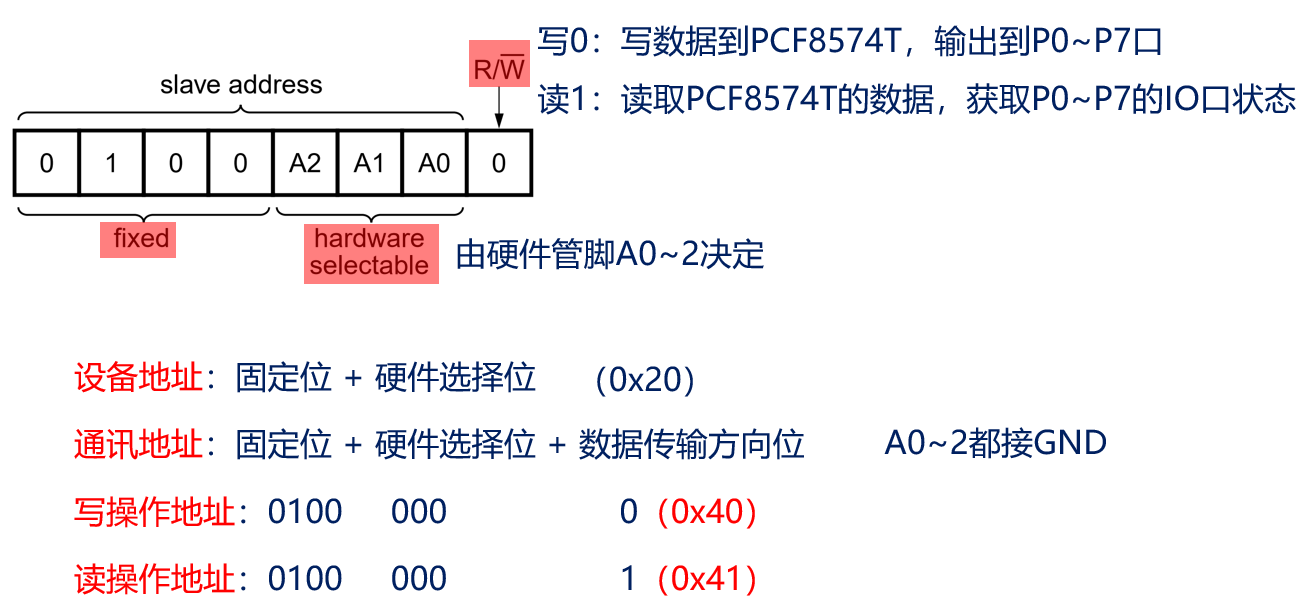
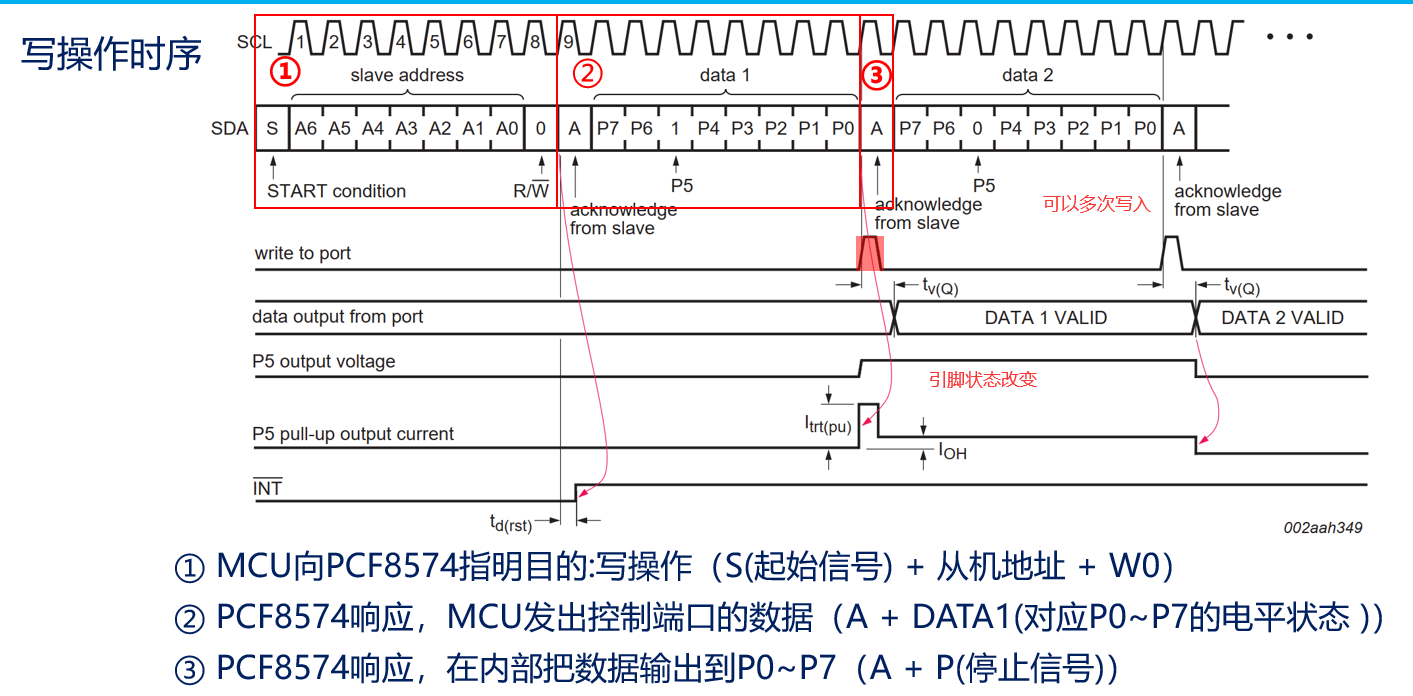
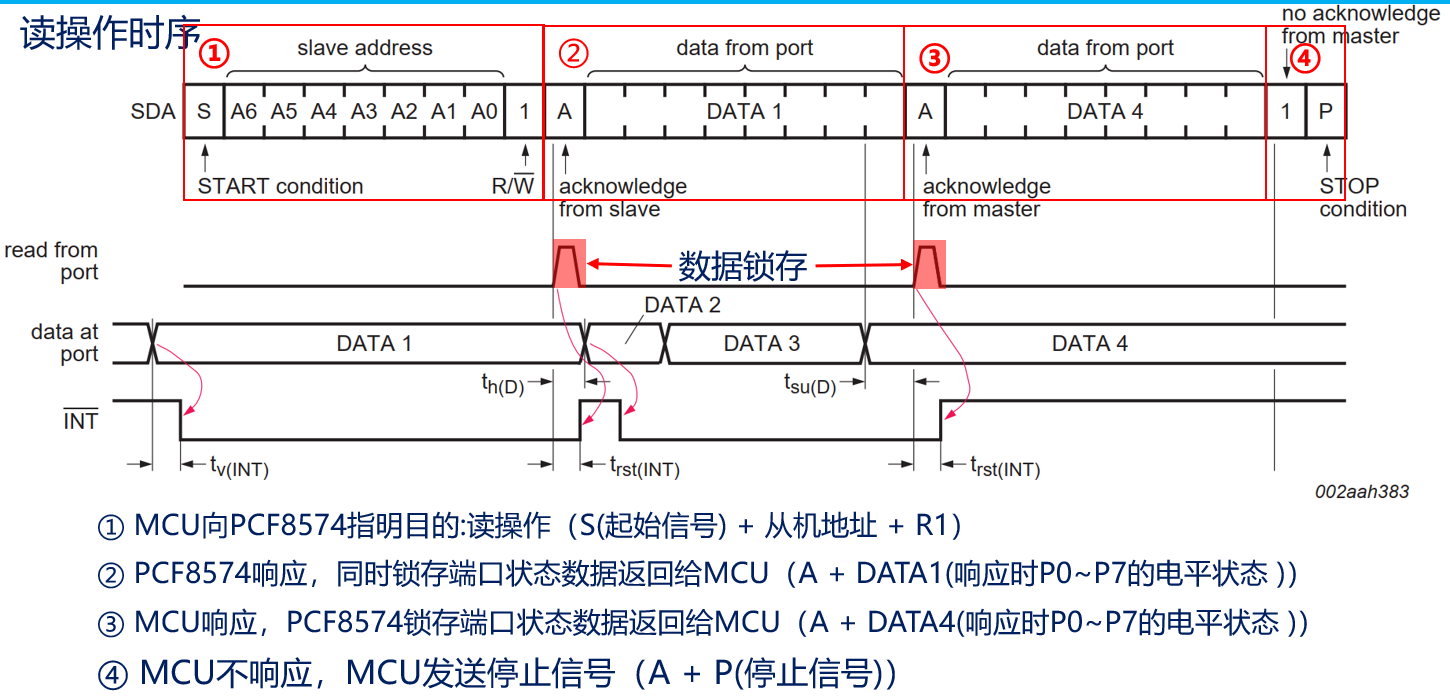
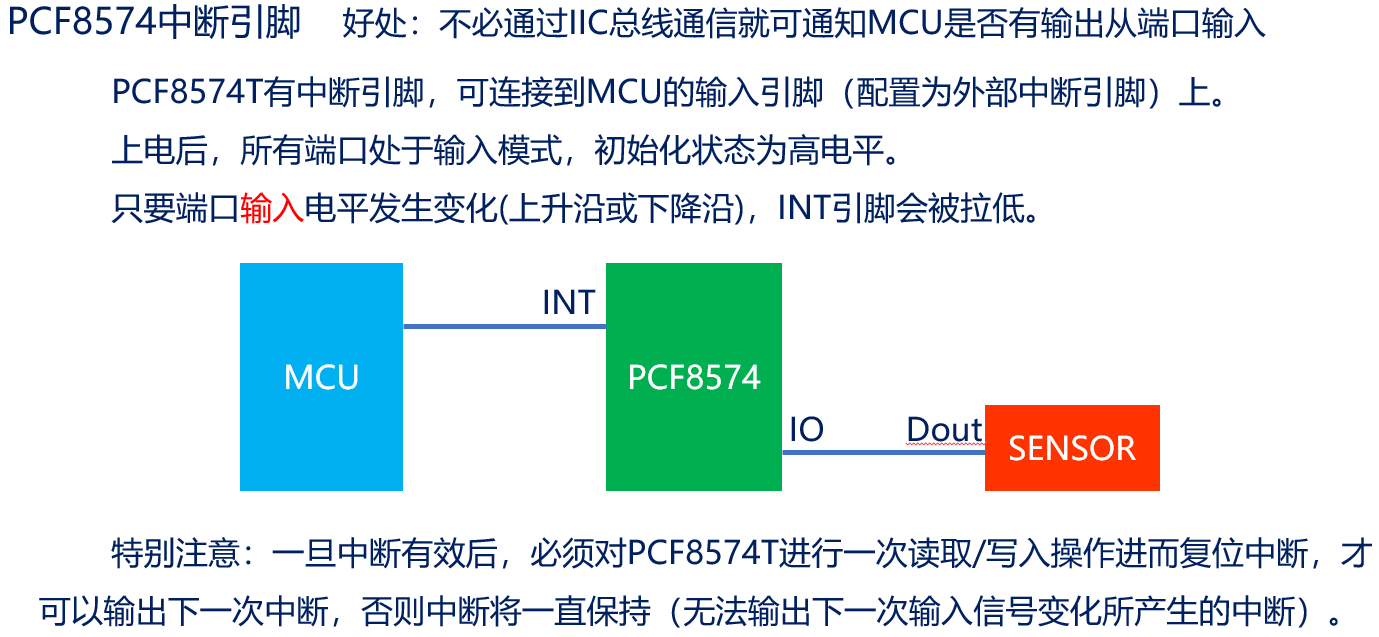
I/O扩展
使用PCF8574T芯片使用IIC协议进行扩展
有一个IIC总线接口, 8个准双向口, 1个中断线, 3个地址线
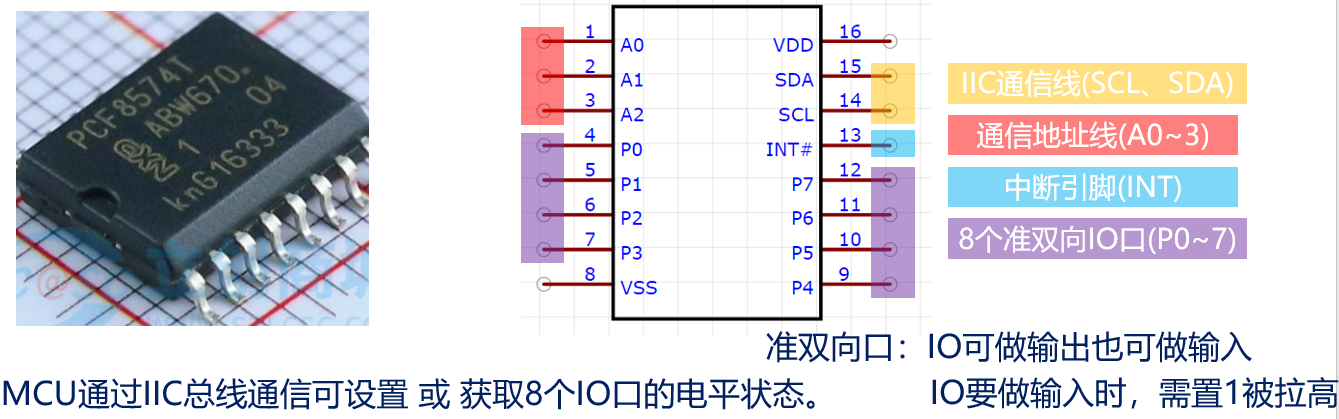
准双向口内部有一个弱上拉电阻,上拉电阻不可避免地会影响到引脚的电路行为特性,而且在原始的8051MCU中这个上拉电阻是不能人为控制或断开的。双向口的开漏结构意味着使用者可以通过自己配置外部电路完全控制端口的电路行为特性,不用担心并联的内部上拉的影响。